This is the latest
(unstable) version of this documentation, which may document features
not available in or compatible with released stable versions of Godot.
Checking the stable version of the documentation...
The avoidance_priority makes agents with a higher priority ignore agents with a lower priority. This can be used to give certain agents more importance in the avoidance simulation, e.g. important non-playable characters, without constantly changing their entire avoidance layers or mask.
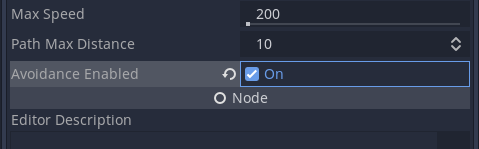
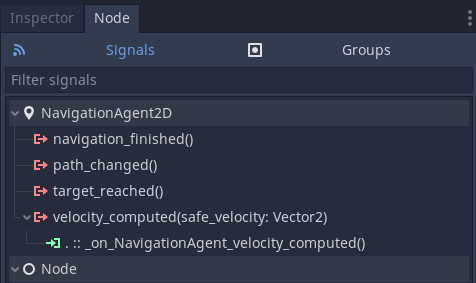
Using the NavigationAgent avoidance_enabled property is the preferred option
to toggle avoidance. The following code snippets can be used to
toggle avoidance on agents, create or delete avoidance callbacks or switch avoidance modes.
extendsNode2D@exportvarmovement_speed:float=4.0@onreadyvarnavigation_agent:NavigationAgent2D=get_node("NavigationAgent2D")varmovement_delta:floatfunc_ready()->void:navigation_agent.velocity_computed.connect(Callable(_on_velocity_computed))funcset_movement_target(movement_target:Vector2):navigation_agent.set_target_position(movement_target)func_physics_process(delta):# Do not query when the map has never synchronized and is empty.ifNavigationServer2D.map_get_iteration_id(navigation_agent.get_navigation_map())==0:returnifnavigation_agent.is_navigation_finished():returnmovement_delta=movement_speed*deltavarnext_path_position:Vector2=navigation_agent.get_next_path_position()varnew_velocity:Vector2=global_position.direction_to(next_path_position)*movement_deltaifnavigation_agent.avoidance_enabled:navigation_agent.set_velocity(new_velocity)else:_on_velocity_computed(new_velocity)func_on_velocity_computed(safe_velocity:Vector2)->void:global_position=global_position.move_toward(global_position+safe_velocity,movement_delta)
extendsCharacterBody2D@exportvarmovement_speed:float=4.0@onreadyvarnavigation_agent:NavigationAgent2D=get_node("NavigationAgent2D")func_ready()->void:navigation_agent.velocity_computed.connect(Callable(_on_velocity_computed))funcset_movement_target(movement_target:Vector2):navigation_agent.set_target_position(movement_target)func_physics_process(delta):# Do not query when the map has never synchronized and is empty.ifNavigationServer2D.map_get_iteration_id(navigation_agent.get_navigation_map())==0:returnifnavigation_agent.is_navigation_finished():returnvarnext_path_position:Vector2=navigation_agent.get_next_path_position()varnew_velocity:Vector2=global_position.direction_to(next_path_position)*movement_speedifnavigation_agent.avoidance_enabled:navigation_agent.set_velocity(new_velocity)else:_on_velocity_computed(new_velocity)func_on_velocity_computed(safe_velocity:Vector2):velocity=safe_velocitymove_and_slide()
extendsRigidBody2D@exportvarmovement_speed:float=4.0@onreadyvarnavigation_agent:NavigationAgent2D=get_node("NavigationAgent2D")func_ready()->void:navigation_agent.velocity_computed.connect(Callable(_on_velocity_computed))funcset_movement_target(movement_target:Vector2):navigation_agent.set_target_position(movement_target)func_physics_process(delta):# Do not query when the map has never synchronized and is empty.ifNavigationServer2D.map_get_iteration_id(navigation_agent.get_navigation_map())==0:returnifnavigation_agent.is_navigation_finished():returnvarnext_path_position:Vector2=navigation_agent.get_next_path_position()varnew_velocity:Vector2=global_position.direction_to(next_path_position)*movement_speedifnavigation_agent.avoidance_enabled:navigation_agent.set_velocity(new_velocity)else:_on_velocity_computed(new_velocity)func_on_velocity_computed(safe_velocity:Vector2):linear_velocity=safe_velocity
usingGodot;publicpartialclassMyNode2D:Node2D{[Export]publicfloatMovementSpeed{get;set;}=4.0f;NavigationAgent2D_navigationAgent;privatefloat_movementDelta;publicoverridevoid_Ready(){_navigationAgent=GetNode<NavigationAgent2D>("NavigationAgent2D");_navigationAgent.VelocityComputed+=OnVelocityComputed;}privatevoidSetMovementTarget(Vector2movementTarget){_navigationAgent.TargetPosition=movementTarget;}publicoverridevoid_PhysicsProcess(doubledelta){// Do not query when the map has never synchronized and is empty.if(NavigationServer2D.MapGetIterationId(_navigationAgent.GetNavigationMap())==0){return;}if(_navigationAgent.IsNavigationFinished()){return;}_movementDelta=MovementSpeed*(float)delta;Vector2nextPathPosition=_navigationAgent.GetNextPathPosition();Vector2newVelocity=GlobalPosition.DirectionTo(nextPathPosition)*_movementDelta;if(_navigationAgent.AvoidanceEnabled){_navigationAgent.Velocity=newVelocity;}else{OnVelocityComputed(newVelocity);}}privatevoidOnVelocityComputed(Vector2safeVelocity){GlobalPosition=GlobalPosition.MoveToward(GlobalPosition+safeVelocity,_movementDelta);}}
usingGodot;publicpartialclassMyCharacterBody2D:CharacterBody2D{[Export]publicfloatMovementSpeed{get;set;}=4.0f;NavigationAgent2D_navigationAgent;publicoverridevoid_Ready(){_navigationAgent=GetNode<NavigationAgent2D>("NavigationAgent2D");_navigationAgent.VelocityComputed+=OnVelocityComputed;}privatevoidSetMovementTarget(Vector2movementTarget){_navigationAgent.TargetPosition=movementTarget;}publicoverridevoid_PhysicsProcess(doubledelta){// Do not query when the map has never synchronized and is empty.if(NavigationServer2D.MapGetIterationId(_navigationAgent.GetNavigationMap())==0){return;}if(_navigationAgent.IsNavigationFinished()){return;}Vector2nextPathPosition=_navigationAgent.GetNextPathPosition();Vector2newVelocity=GlobalPosition.DirectionTo(nextPathPosition)*MovementSpeed;if(_navigationAgent.AvoidanceEnabled){_navigationAgent.Velocity=newVelocity;}else{OnVelocityComputed(newVelocity);}}privatevoidOnVelocityComputed(Vector2safeVelocity){Velocity=safeVelocity;MoveAndSlide();}}
usingGodot;publicpartialclassMyRigidBody2D:RigidBody2D{[Export]publicfloatMovementSpeed{get;set;}=4.0f;NavigationAgent2D_navigationAgent;publicoverridevoid_Ready(){_navigationAgent=GetNode<NavigationAgent2D>("NavigationAgent2D");_navigationAgent.VelocityComputed+=OnVelocityComputed;}privatevoidSetMovementTarget(Vector2movementTarget){_navigationAgent.TargetPosition=movementTarget;}publicoverridevoid_PhysicsProcess(doubledelta){// Do not query when the map has never synchronized and is empty.if(NavigationServer2D.MapGetIterationId(_navigationAgent.GetNavigationMap())==0){return;}if(_navigationAgent.IsNavigationFinished()){return;}Vector2nextPathPosition=_navigationAgent.GetNextPathPosition();Vector2newVelocity=GlobalPosition.DirectionTo(nextPathPosition)*MovementSpeed;if(_navigationAgent.AvoidanceEnabled){_navigationAgent.Velocity=newVelocity;}else{OnVelocityComputed(newVelocity);}}privatevoidOnVelocityComputed(Vector2safeVelocity){LinearVelocity=safeVelocity;}}
extendsNode3D@exportvarmovement_speed:float=4.0@onreadyvarnavigation_agent:NavigationAgent3D=get_node("NavigationAgent3D")varphysics_delta:floatfunc_ready()->void:navigation_agent.velocity_computed.connect(Callable(_on_velocity_computed))funcset_movement_target(movement_target:Vector3):navigation_agent.set_target_position(movement_target)func_physics_process(delta):# Save the delta for use in _on_velocity_computed.physics_delta=delta# Do not query when the map has never synchronized and is empty.ifNavigationServer3D.map_get_iteration_id(navigation_agent.get_navigation_map())==0:returnifnavigation_agent.is_navigation_finished():returnvarnext_path_position:Vector3=navigation_agent.get_next_path_position()varnew_velocity:Vector3=global_position.direction_to(next_path_position)*movement_speedifnavigation_agent.avoidance_enabled:navigation_agent.set_velocity(new_velocity)else:_on_velocity_computed(new_velocity)func_on_velocity_computed(safe_velocity:Vector3)->void:global_position=global_position.move_toward(global_position+safe_velocity,physics_delta*movement_speed)
extendsCharacterBody3D@exportvarmovement_speed:float=4.0@onreadyvarnavigation_agent:NavigationAgent3D=get_node("NavigationAgent3D")func_ready()->void:navigation_agent.velocity_computed.connect(Callable(_on_velocity_computed))funcset_movement_target(movement_target:Vector3):navigation_agent.set_target_position(movement_target)func_physics_process(delta):# Do not query when the map has never synchronized and is empty.ifNavigationServer3D.map_get_iteration_id(navigation_agent.get_navigation_map())==0:returnifnavigation_agent.is_navigation_finished():returnvarnext_path_position:Vector3=navigation_agent.get_next_path_position()varnew_velocity:Vector3=global_position.direction_to(next_path_position)*movement_speedifnavigation_agent.avoidance_enabled:navigation_agent.set_velocity(new_velocity)else:_on_velocity_computed(new_velocity)func_on_velocity_computed(safe_velocity:Vector3):velocity=safe_velocitymove_and_slide()
extendsRigidBody3D@exportvarmovement_speed:float=4.0@onreadyvarnavigation_agent:NavigationAgent3D=get_node("NavigationAgent3D")func_ready()->void:navigation_agent.velocity_computed.connect(Callable(_on_velocity_computed))funcset_movement_target(movement_target:Vector3):navigation_agent.set_target_position(movement_target)func_physics_process(delta):# Do not query when the map has never synchronized and is empty.ifNavigationServer3D.map_get_iteration_id(navigation_agent.get_navigation_map())==0:returnifnavigation_agent.is_navigation_finished():returnvarnext_path_position:Vector3=navigation_agent.get_next_path_position()varnew_velocity:Vector3=global_position.direction_to(next_path_position)*movement_speedifnavigation_agent.avoidance_enabled:navigation_agent.set_velocity(new_velocity)else:_on_velocity_computed(new_velocity)func_on_velocity_computed(safe_velocity:Vector3):linear_velocity=safe_velocity
usingGodot;publicpartialclassMyNode3D:Node3D{[Export]publicfloatMovementSpeed{get;set;}=4.0f;NavigationAgent3D_navigationAgent;privatefloat_movementDelta;publicoverridevoid_Ready(){_navigationAgent=GetNode<NavigationAgent3D>("NavigationAgent3D");_navigationAgent.VelocityComputed+=OnVelocityComputed;}privatevoidSetMovementTarget(Vector3movementTarget){_navigationAgent.TargetPosition=movementTarget;}publicoverridevoid_PhysicsProcess(doubledelta){// Do not query when the map has never synchronized and is empty.if(NavigationServer3D.MapGetIterationId(_navigationAgent.GetNavigationMap())==0){return;}if(_navigationAgent.IsNavigationFinished()){return;}_movementDelta=MovementSpeed*(float)delta;Vector3nextPathPosition=_navigationAgent.GetNextPathPosition();Vector3newVelocity=GlobalPosition.DirectionTo(nextPathPosition)*_movementDelta;if(_navigationAgent.AvoidanceEnabled){_navigationAgent.Velocity=newVelocity;}else{OnVelocityComputed(newVelocity);}}privatevoidOnVelocityComputed(Vector3safeVelocity){GlobalPosition=GlobalPosition.MoveToward(GlobalPosition+safeVelocity,_movementDelta);}}
usingGodot;publicpartialclassMyCharacterBody3D:CharacterBody3D{[Export]publicfloatMovementSpeed{get;set;}=4.0f;NavigationAgent3D_navigationAgent;publicoverridevoid_Ready(){_navigationAgent=GetNode<NavigationAgent3D>("NavigationAgent3D");_navigationAgent.VelocityComputed+=OnVelocityComputed;}privatevoidSetMovementTarget(Vector3movementTarget){_navigationAgent.TargetPosition=movementTarget;}publicoverridevoid_PhysicsProcess(doubledelta){// Do not query when the map has never synchronized and is empty.if(NavigationServer3D.MapGetIterationId(_navigationAgent.GetNavigationMap())==0){return;}if(_navigationAgent.IsNavigationFinished()){return;}Vector3nextPathPosition=_navigationAgent.GetNextPathPosition();Vector3newVelocity=GlobalPosition.DirectionTo(nextPathPosition)*MovementSpeed;if(_navigationAgent.AvoidanceEnabled){_navigationAgent.Velocity=newVelocity;}else{OnVelocityComputed(newVelocity);}}privatevoidOnVelocityComputed(Vector3safeVelocity){Velocity=safeVelocity;MoveAndSlide();}}
usingGodot;publicpartialclassMyRigidBody3D:RigidBody3D{[Export]publicfloatMovementSpeed{get;set;}=4.0f;NavigationAgent3D_navigationAgent;publicoverridevoid_Ready(){_navigationAgent=GetNode<NavigationAgent3D>("NavigationAgent3D");_navigationAgent.VelocityComputed+=OnVelocityComputed;}privatevoidSetMovementTarget(Vector3movementTarget){_navigationAgent.TargetPosition=movementTarget;}publicoverridevoid_PhysicsProcess(doubledelta){// Do not query when the map has never synchronized and is empty.if(NavigationServer3D.MapGetIterationId(_navigationAgent.GetNavigationMap())==0){return;}if(_navigationAgent.IsNavigationFinished()){return;}Vector3nextPathPosition=_navigationAgent.GetNextPathPosition();Vector3newVelocity=GlobalPosition.DirectionTo(nextPathPosition)*MovementSpeed;if(_navigationAgent.AvoidanceEnabled){_navigationAgent.Velocity=newVelocity;}else{OnVelocityComputed(newVelocity);}}privatevoidOnVelocityComputed(Vector3safeVelocity){LinearVelocity=safeVelocity;}}